
ARMY TM 9-6675-349-12&P
MARINE CORPS TM 11039A-12&P
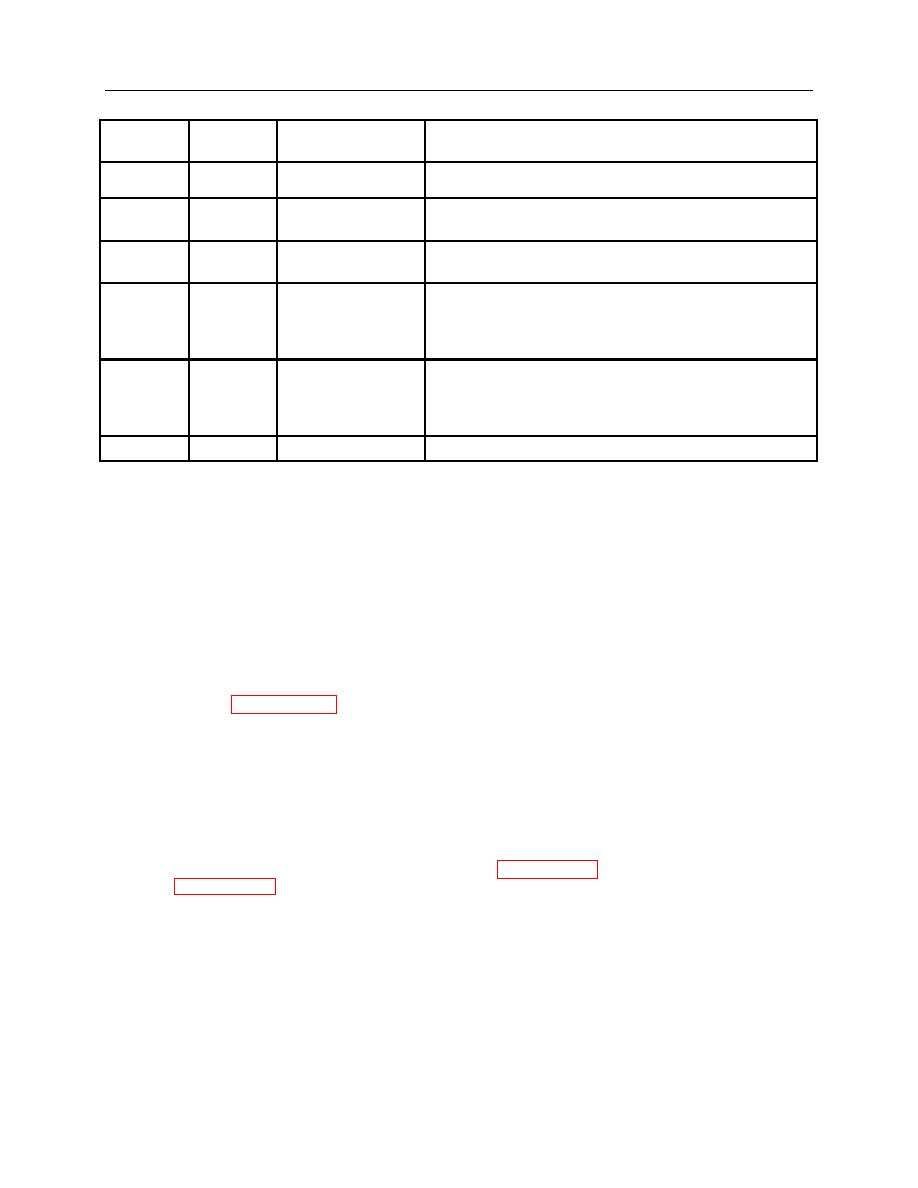
Filter
Mode
POINT LIST Page
Description
Type
Line
MISSION FILTER
Mission
FL:MISN
All unadjusted IPADS points established during current
mission.
Unadjusted IPADS SCP (OS) before closure; Adjusted
SCP
FL:SCP
ALL SCP
IPADS SCP (OS) after closure adjustment. Known SCP
Navigation way points entered by operator. They are used for
Way point
FL:WAY
ALL WAY PTS
navigation.
Points in the MARK list are for the second point (EOL) of a
Mark
FL:MARK
ALL MARKED PTS
two-position azimuth. Unadjusted IPADS mark points (EOL)
before closure; Adjusted IPADS mark points (EOL) after
closure adjustment.
User
Unadjusted IPADS SCP (OS) and mark points (EOL) after
FL:USER
ALL USERDEF
Defined
closure adjustment. User Defined point could be a point
established by GPS for an initiation point until a SCP can be
located to adjust the mission.
All Points
FL:ALL
ALL POINTS
All points in IPADS database.
e. Press ENTER to recall all other data associated with the point, e.g. altitude, azimuth to one or two other
points, PAE code, date and time of creation, and description.
3-21. Marking.
NOTE
IPADS measures altitude at ground level under the plumb bob. If the survey
marker is at a different height, adjust the altitude for the difference.
Marking points for HMMWV, SUSV, and UH-60 are covered in this
section.
a.
The establishment of survey coordinates and azimuth with IPADS is called "marking". IPADS can store
data for more than 360 positions. Marks are assigned names and are saved in the point database as
discussed in paragraphs 3-27 and 3-28. The operator may change IPADS assigned names.
b.
Positions can be established using the plumb bob as reference or can be offset from the IPADS system
using a theodolite (optical position mark, no azimuth).
c.
Azimuths to distant landmarks can be established using a theodolite (optical position and azimuth mark).
An azimuth of a short line (100 to 1000 meters) can be established by marking both ends of the required
azimuth line with IPADS (2-position azimuth mark using plumb bob) or using theodolite and performing
an optical position and azimuth mark.
d.
An optical position and azimuth mark requires the operator to auto-reflect, measure a horizontal angle,
vertical angle, and the offset distance with a theodolite, paragraph 3-24. Marking procedures are described
in paragraphs 3-21, 3-22, 3-23, and 3-25.
e.
If the wrong vehicle has been selected for the vehicle in use, the effective position of the IPADS to the
plumb bob reference point is incorrect and will provide incorrect mark/update information.
f.
IPADS automatically assigns point names and mark identifiers at mark completion. Operator should
change assigned names and identifiers to more meaningful descriptors.
g.
After adjustment, IPADS stores adjusted data in the SCP and MARK POINT LISTs and unadjusted data in
the USER DEF POINT LIST. First character in PNT NAME or MARK ID changes to "U" for unadjusted
data. Where space permits, the first two characters of entered names and identifiers should be spaces to
allow for unadjusted identification without changing the name or identifier.
3-55
